موتور الکتریکی نوعی ماشین الکتریکی است که الکتریسیته را به حرکت مکانیکی تبدیل میکند. عمل عکس آن که تبدیل حرکت مکانیکی به الکتریسیتهاست، توسط ژنراتور انجام میشود. این دو وسیله بجز در عملکرد، مشابه یکدیگر هستند. اکثر موتورهای الکتریکی توسط الکترومغناطیس کار میکنند، اما موتورهایی که بر اساس پدیدههای دیگری نظیر نیروی الکترواستاتیک و اثر پیزوالکتریک کار میکنند، هم وجود دارند.

ایده کلی این است که وقتی که یک ماده حامل جریان الکتریسیته تحت اثر یک میدان مغناطیسی قرار میگیرد، نیرویی بر روی آن ماده از سوی میدان اعمال میشود. در یک موتور استوانهای، چرخانه (روتور) به علت گشتاوری که ناشی از نیرویی است که به فاصلهای معین از محور چرخانه به چرخانه اعمال میشود، میگردد.
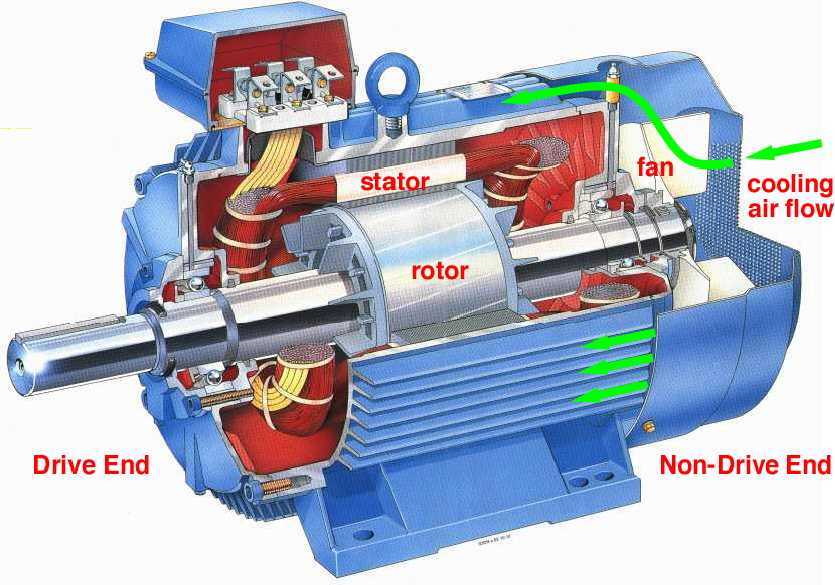
اغلب موتورهای الکتریکی دوار هستنند، اما موتور خطی هم وجود دارند. در یک موتور دوار بخش متحرک (که معمولاً درون موتور است) چرخانه یا روتور و بخش ثابت ایستانه یا استاتور خوانده میشود. موتور شامل آهنرباهای الکتریکی است که روی یک قاب سیم پیچی شدهاست. گر چه این قاب اغلب آرمیچر خوانده میشود، اما این واژه عموماً به غلط بکار برده میشود. در واقع آرمیچر آن بخش از موتور است که به آن ولتاژ ورودی اعمال میشود یا آن بخش از ژنراتور است که در آن ولتاژ خروجی ایجاد میشود. با توجه به طراحی ماشین، هر کدام از بخشهای چرخانه یا ایستانه میتوانند به عنوان آرمیچر باشند.
موتورهای القایی AC
عمومیترین موتورهایی هستند که در سامانههای کنترل حرکت صنعتی و همچنین خانگی استفاده میشوند. طراحی ساده و مستحکم، قیمت ارزان، هزینه نگه داری پایین و اتصال آسان و کامل به یک منبع نیروی AC امتیازات اصلی موتورهای القایی AC هستند. انواع متنوعی از موتورهای القایی AC در بازار موجود است. موتورهای مختلف برای کارهای مختلفی مناسب اند. با اینکه طراحی موتورهای القایی AC آسانتر از موتورهای DC است، ولی کنترل سرعت و گشتاور در انواع مختلف موتورهای القایی AC نیازمند درکی عمیقتر در طراحی و مشخصات در این نوع موتورهاست. این نکته در اساس انواع مختلف، مشخصات آنها، انتخاب شرایط برای کاربریهای مختلف و روشهای کنترل مرکزی یک موتورهای القایی AC را مورد بحث قرار میدهد.
عموماً دسته بندی موتورهای القای براساس تعداد پیچههای استاتور است که عبارتند از:
موتورهای القایی تک فاز
موتورهای القایی سه فاز
موتورهای القایی تک فاز
احتمالاً بیشتر از کل انواع موتورها از موتورهای القایی AC تک فاز استفاده میشود. منطقی است که باید موتورهای دارای کمترین گرانی و هزینه نگه داری بیشتر استفاده شود. موتور القایی AC تک فاز بهترین مصداق این توصیف است. آن طور که از نام آن برمیاید این نوع از موتور تنها یک پیچه (پیچه اصلی) دارد و با یک منبع تغذیه تک فاز کار میکند. در تمام موتورهای القایی تک فاز روتور از نوع قفس سنجابی است. موتور القایی تک فاز خود راه انداز نیست. هنگامی که موتور به یک تغذیه تک فاز متصل است پیچه اصلی دارای جریانی متناوب میشود. این جریان متناوب میدان مغناطیسی ای ضربانی تولید میکند. بسبب القا روتور تحریک میشود. چون میدان مغناطیسی اصلی ضربانی است تورکی که برای چرخش موتور لازم است بوجود نمیآید و سبب ارتعاش روتور و نه چرخش آن میشود. از این رو موتور القایی تک فاز به دستگاه آغاز گری نیاز داردکه میتواندضربات آغازی را برای چرخش موتور تولید کند. دستگاه آغاز گر موتورهای القایی تک فاز اساساً پیچهای اضافی در استاتور است (پیچه کمکی) که در شکل سه نشان داده شدهاست. پیچه استارت میتواند دارای خازنهای سری ویا سوئیچ گریز از مرکز باشد. هنگامی که ولتاژ تغذیه برقرار است جریان در پیچه اصلی بسبب مقاومت پیچه اصلی ولتاژتغذیه را افت میدهد (ولتاژ به جریان تبدیل میشود). در همین حین جریان در پیچه استارت بسته به مقاومت دستگاه استارت به افزایش ولتاژ تغذیه تبدیل میشود. فعل و انفعال میان میدانهای مغناطیسی که پیچه اصلی و دستگاه استارت میسازند میدان برایندی میسازند که در جهتی گردش میکند. موتور گردش را در جهت این میدان برایند آغاز میکند. هنگامی که موتور به ۷۵ درصد دور مجاز خود میرسد یک سوئیچ گریز از مرکز پیچه استارت را از مدار خارج میکند. از این لحظه به بعد موتور تک فاز میتواند تورک کافی را برای ادامه کارکرد خود نگه دارد. بجز انواع خاص دارای Capacitor start / capacitor run عموماهمه موتورهای تک فاز فقط برای کاربریهای بالای 3/4 hp استفاده میشوند. بسته به انواع تکنیکهای استارت موتورهای القایی تک فاز AC در دسته بندی ای وسیع آن گونه که در شکل زیر توصیف شده قرار دارند.

موتورهای AC سه فاز
برای کاربردهای نیازمند به توان بالاتر، از موتورهای القایی سه فاز AC (یا چند فاز) استفاده میشود. این موتورها از اختلاف فاز موجود بین فازهای تغذیه چند فاز الکتریکی برای ایجاد یک میدان الکترومغناطیسی دوار درونشان، استفاده میکنند. اغلب، روتور شامل تعدادی هادیهای مسی است که در فولاد قرار داده شدهاند. از طریق القای الکترومغناطیسی میدان مغناطیسی دوار در این هادیها القای جریان میکند، که در نتیجه منجر به ایجاد یک میدان مغناطیسی متعادل کننده شده و موجب میشود که موتور در جهت گردش میدان به حرکت در آید.
این نوع از موتور با نام موتور القایی معروف است. برای اینکه این موتور به حرکت درآید بایستی همواره موتور با سرعتی کمتر از بسامد منبع تغذیه اعمالی به موتور، بچرخد، چرا که در غیر این صورت میدان متعادل کنندههای در روتور ایجاد نخواهد شد. استفاده از این نوع موتور در کاربردهای ترکشن نظیر لوکوموتیوها، که در آن به موتور ترکشن آسنکرون معروف است، روز به روز در حال افزایش است. به سیم پیچهای روتور جریان میدان جدایی اعمال میشود تا یک میدان مغناطیسی پیوسته ایجاد شود، که در موتور همزمان وجود دارد، موتور به صورت همزمان با میدان مغناطیسی دوار ناشی از برق AC سه فاز، به گردش در میآید. موتورهای همزمان (سنکرون) را میتوانیم به عنوان مولد جریان هم بکار برد.
سرعت موتور AC در ابتدا به فرکانس تغذیه بستگی دارد و مقدار لغزش، یا اختلاف در سرعت چرخش بین چرخانه و میدان ایستانه، گشتاور تولیدی موتور را تعیین میکند. تغییر سرعت در این نوع از موتورها را میتوان با داشتن دسته سیم پیچها یا قطبهایی در موتور که با روشن و خاموش کردنشان سرعت میدان دوار مغناطیسی تغییر میکند، ممکن ساخت. به هر حال با پیشرفت الکترونیک قدرت میتوانیم با تغییر دادن بسامد منبع تغذیه، کنترل یکنواخت تری بر روی سرعت موتورها داشته باشیم.

موتور قفس سنجابی
تقریباً ۹۰ درصد موتورهای القایی AC سه فاز از این نوعند. که روتور آنها از نوع قفس سنجابی است که در ابتدا توضیح داده شد. محدودههای طبقه بندی نیروی آنها از یک سوم تا چند صد اسب بخار است. موتورهای این نوعی که در دسته یک اسب بخار به بالا اند در مقایسه با مشابههای تک فاز کم هزینه ترند و میتوانند در استارت در فشارهای سنگینتر بکار کنند.